
 Tiếng Việt
Tiếng Việt
ABSTRACT
Litopenaeus vannamei, as the main target of shrimp farming in China, has a great market prospect and high economic value. However, domestic Litopenaeus vannamei farming and feeding efficiency are low, mainly through the use of hand tools by farmers to complete the feed throwing work, and the feed cost is high. Therefore, in view of the high density and low visibility of culture ponds in Litopenaeus vannamei aquaculture industry, it is impossible to judge the quantity and time of feed feeding by visual way. In this study, based on the analysis of acoustic feeding signal characteristics of Litopenaeus vannamei, accurate and intelligent control of feed amount is proposed, so as to reduce the breeding cost and obtain environmental benefits. This study designed a system for collecting and analyzing the acoustic signals of the feeding motion of Litopenaeus vannamei. Based on passive acoustic technology, the motion acoustic signal of Litopenaeus vannamei is extracted when starving. Through time domain and frequency domain research, the characteristic parameters of the motion acoustic signal of the specific body type of Litopenaeus vannamei are determined. The signal duration range is 8-10ms, and the average range of the resonance band is 2-10KHz. Furthermore, the dual-threshold method is further used to detect the effective range of the feeding signals, and then the number of acoustic signals is obtained, and the corresponding magnitude relationship between the characteristic parameters and the starvation degree of Litopenaeus vannamei is established, which can be used as a basis for judging intelligent feeding on demand. The research provides theoretical support for the feasibility of studying the feeding patterns of Litopenaeus vannamei through underwater passive acoustic detection.
I. INTRODUCTION
Passive acoustic technology uses the radiated noise of underwater targets in different environments to detect, locate, track and identify targets [1]. By studying the correlation between the behavioral information of different aquatic species and their sound signals, it is gradually applied in underwater Biological research. For underwater creatures, specific psychological and physiological behaviors are difficult to visually observe [2]. However, they can transmit intraspecific and interspecific by vocalization, that is, they will make different sounds according to specific behaviors. For example, when eating [3], when moving underwater [4], when spawning, the panic sound made to avoid predators [5], and the different vocalization patterns due to regional seasonal problems [6], The associate editor coordinating the review of this manuscript and approving it for publication was Jiajia Jiang . etc. Therefore, the use of passive acoustic technology to study the characteristics of the acoustic signals of different underwater creatures’ specific behaviors has important theoretical and engineering practical application values. Passive acoustic technology can realize long-term detection of marine life and marine environment because of its low damage and low destructiveness. In the field of fish biology and fisheries, this technology can be used to determine the habitat, distribution, spawning area and living habits of fish [2]. Hawkins et al. [7], by studying the correlation between the vocalization of gadoid fish and its vocal structure, described the calling signals of gadoid fish in different situations. In addition, Abileah et al. [8] used the US Navy Sound Monitoring System (SOSUS) to conduct passive acoustic monitoring experiments to study the sound spectrum characteristics of salmon in the North Pacific Ocean. In the northern part of the Gulf of Nicoya, Donald et al. [9] used hydrophones to capture the sound made by Cynoscion squamipinnis (Perciformes: Sciaenidae) during spawning, so as to determine the spawning place of Cynoscion squamipinnis. Nelson et al. [10] studied the relationship between the acoustic activity and behavior of red grouper Epinephelus morio on the West Florida Shelf and found that the detected acoustic signals were related to spawning activities.
Relatively, passive acoustic technology also plays an effective observation role in the acoustic detection of underwater shrimp. Using passive acoustic technology, Au et al. [4] used hydrophones to collect and characterize the ‘‘click’’ noise signal emitted by snapping shrimp in the Kaneohe Bay. However, Bohnenstiehl et al. [6] through the year-long sound monitoring of snapping shrimp in Sub-Tidal Oyster Reef Habitat, analyzed the seasonality and the regular changes within a day of snapping shrimp sound, which has certain significance for the study of ocean acoustic landscape. Daniel et al. [3] analyzed the feeding signal of tiger prawns and determined the characteristics of tiger prawns’ feeding sound, which provided a reliable means for detecting feeding activity in commercial ponds with complex acoustics. In contrast, Litopenaeus vannamei represents approximately 80% of the world’s shrimp production. It is also the main target of shrimp farming in China and has high economic value. Passive acoustic technology is used to study the characteristics of the acoustic signal state of Litopenaeus vannamei feeding movement, and then establish a feed management system that automatically feeds on demand, thereby saving labor and feed costs, and further improving the economic value of production of Litopenaeus vannamei aquaculture industry. In the currently published literature, there are few studies on the acoustic signals related to the feeding activities of Litopenaeus vannamei, and it is difficult to judge whether the shrimp are eating or not based on the acoustic signals. Existing studies generally believe that when Litopenaeus vannamei eats, the food is crushed by the collision and friction of the jaws of the shrimp to produce acoustic signals, and the feeding sound is a continuous ‘‘click’’ sound [11]. However, this study has found through many experiments that the acoustic signals emitted by Litopenaeus vannamei when feeding are mainly produced by the behavior of the shrimps swimming and grabbing food when they are hungry. It is also similar to the continuous single pulse signal, which can be used as a representative of shrimp feeding activities. With the decrease of starvation degree, the intensity of shrimp movement gradually decreases, and the number of signals generated gradually decreases. The study mainly used time domain and frequency domain analysis to discuss the main acoustic parameters produced during the feeding process of adult Litopenaeus vannamei in the experimental water tank. Perform signal detection of the effective range on the confirmed shrimp feeding signals and calculate the number of feeding sound signals, which will help future follow-up study. The rest of the paper is organized as: In Section II, the collection and analysis system, experimental scenes and methods will be elaborated. In Section III, in the time domain and frequency domain, the characteristics of the collected eating sound signals are analyzed to indicate that the feeding activities of shrimp are related to their behavior of swimming and grabbing food when they are hungry. In Section IV, dual-threshold method is used to detect the effective range and calculate the number of feeding signals. In Section V, analyze the characteristics of the noise signal generated by the oxygen generator that affects the collection of the target feeding signal. The final conclusion is discussed in Section VI.
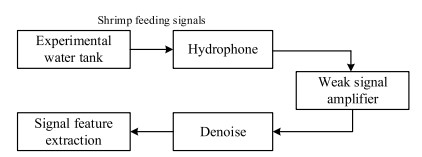
FIGURE 1. Feature extraction system for acoustic feeding signal of Litopenaeus vannamei.
II. SYSTEM DESCRIPTION
A. ACOUSTIC FEATURE EXTRACTION
The real-time acquisition and analysis system of feeding sound signal of Litopenaeus vannamei based on passive acoustic technology is shown in Fig. 1. According to the needs of the experiment, the required number of shrimp in the water tank is caged. After feeding, the shrimp feeding signals are generated. The high-performance hydrophone is used to convert the underwater sound signals of the shrimp into electrical signals. After the weak signal amplifier, the electrical signals are converted into digital signals through the data acquisition card. During the experiment, the camera equipment is responsible for recording the various motion states of Litopenaeus vannamei when feeding, and cooperate with hydrophone to extract the shrimp feeding signals to be studied. Using digital filtering technology to remove underwater environmental noise and electrical noise from the collected acoustic signal data, complete the collection and detection of shrimp feeding signals. In order to simulate the difference of shrimp feeding signals under different environmental conditions, it is necessary to change the feeding times and the number of shrimp to realize the passive acoustic signal detection of Litopenaeus vannamei under different conditions. After statistical analysis, the degree of shrimp starvation can be obtained, and then the shrimp feed can be controlled on demand.
B. EXPERIMENTAL SCENE
The experimental site is located in the Xiaxinglong breeding base, Haicang District, Xiamen City, Fujian Province. The experimental time is late June 2020. Before the experiment, 5 and 10 adult Litopenaeus vannamei were placed in two water tanks (40 × 20cm in length and width) with fresh water and continuous oxygen supply, which was conducive to the shrimp to be familiar with the environment of the experimental water tank, as shown in Fig. 2. Before the experiment started, the shrimp were fasted. Since the sound signal is directly related to the start of feeding, this delay may be related to the time required for the shrimp to detect and reach the food, as well as the satiety and attractiveness of the food provided. Therefore, make sure that the shrimp are hungry before the start of the experiment, thus maintaining an interest in food. In this experiment, the fasting time for the shrimp was 24 hours. Placing the shrimp in a small-volume water tank helps the shrimp detect and grab food faster

FIGURE 2. The experimental water tank.
The experiment uses WBT22-1107 hydrophone to collect the shrimp feeding sound signal. The receiving sensitivity response of the hydrophone is −193dB ± 3dB @22KHz (re 1 V/µPa @1m, 20m cable), and the experimental sampling rate is 100KHz. Because after feeding, the shrimp mainly eat at the bottom of tank. Therefore, during the experiment, the hydrophone was placed in the center of the water tank down close to the shrimp, as shown in Fig. 3. The whole process of the experiment was recorded synchronously using camera equipment.

FIGURE 3. Location of hydrophone.
Because the sound signals generated by the shrimp feeding motion is very weak, when the oxygen generator is turned on, the noise generated by it is too loud, which affects the acquisition of the target signals. Therefore, the signal collection in this experiment was performed with the oxygen generator turned off, and there was no interference from other acoustic signals.
C. EXPERIMENTAL DATA COLLECTION AND ANALYSIS
In order to observe the feeding situation of different numbers of shrimp under the continuous feeding times, in the experimental water tanks with 5 and 10 shrimps respectively, signal data were collected for three consecutive feedings, and the shrimp feeding situation was recorded by camera equipment. After the hydrophone was placed successfully, it did not affect the normal activity of the shrimp. In the experimental water tanks with different numbers of shrimp, the data collection time of the three feedings was 8 minutes. Before the start of each feeding signal collection, the shrimp were supplied with oxygen for 1 minute to maintain the normal state. After the signals are collected, all the signals are denoised to filter out the influence of low-frequency electrical noise on the target signals. Based on the time domain, frequency domain and time-frequency analysis of feeding signals of Litopenaeus vannamei, the acoustic characteristics of feeding signals are analyzed and discussed. In the spectrum analysis, the Welch method is used to calculate the power spectrum of the signal, and the Blackman window weighting function is applied, and the frequency resolution is 390 Hz. With a window length of 0.1s, the short-time Fourier transform of the signal is calculated, which is defined as:
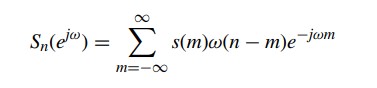
where s(m) is the shrimp feeding signal sequence; ω(n) is the real window sequence. With different values of n, the window ω(n − m) slides along the time axis, and different window signals are taken out for Fourier transform to obtain the timefrequency distribution of the feeding signals.
Group of authors: Maochun Wei, Yating Lin, Keyu Chen, Wei Su, (Member, Ieee), và En Cheng
Reference : https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9178285
“Domesticated Shrimp Postlarvae – The Key To Success”
See more:
- Can Astaxanthin Be Replaced With lutein In Diets Of Pacific White Shrimp Juveniles?
- Shrimp And Salmon Farmers Are Set For A Year Of Profits And Plenty
- India To Temporarily Waive Import Duties On Shrimp Broodstock And Aquafeed
